Jan von Bassewitz
jbassewitz@ist.ac.at
Data Science MSc, Mechanical Eng BSc
Autograd: Automatic Differentiation from Scratch
Oct, 2022
Keywords: Optimization
This is a demo of my Autograd repository. To shortly describe what it is:
- Autograd is a automatic differentiation framework that allows for calculating the gradients of a wide range of mathematical expressions (not just neural networks).
- For any mathematical operation of Variables (analog to torch.Tensor) the computation graph is constructed dynamically.
- This can be used to for optimization by doing backpropagation on those Variables.
- It is basically a boiled down analog to pytorch and also follows pytorch’s syntax.
For further details visit the repository on my GitHub. Let’s get started with some examples.
import autograd
from autograd.optimizer import GD
import numpy as np
import torch
import math
import random
import time
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
import pylab
plt.rcParams["figure.figsize"] = (10,10)
Comparing Autograd and PyTorch
To introduce the API and to check how well autograd works we compute the gradient with respect to $x$ of the messy function
\[f(x) := ((x-2)^{2/x}-1)^{x-1}\]
and compare it with the gradient PyTorch would give us. To run more gradient checking tests, you can run the test.py script located at “autogradengine/autograd/test.py”.
def gradient_test_f(x):
return ((x - 3.)**(2./x) - 1) ** (x - 1.)
# Compute gradient df/dx at x=1 using torch
torch_x = torch.Tensor([10.])
torch_x.requires_grad = True
torch_time = time.time()
torch_y = gradient_test_f(torch_x)
torch_y.backward()
torch_time = time.time() - torch_time
torch_grad = torch_x.grad
# Compute gradient df/dx at x=1 using autograd
autograd_x = autograd.Variable(10.)
autograd_time = time.time()
autograd_y = gradient_test_f(autograd_x)
autograd_y.backward()
autograd_time = time.time() - autograd_time
autograd_grad = autograd_x.grad
print(
f"torch gradient {torch_grad.item():.5f} in {torch_time:.5f}s\nautograd gradient: {autograd_grad.item():.5f} in {autograd_time:.5f}s")
if math.isclose(torch_grad, autograd_grad, abs_tol=1e-5):
print("\nThe packages agree!")
torch gradient -0.00129 in 0.02666s
autograd gradient: -0.00129 in 0.00070s
The packages agree!
Simple Example: Minimizing Quadratic Function
As a first simple demo example, we use the autograd engine to solve the minimization problem
\[x^*=\text{argmin}\left[(x-2)^2+4x-2\right]\]
# Defining the function to be optimized
def f(x):
return (x-2)**2 + 4*x - 2
# autograd.Module is analog to torch.nn.Module
class QuadrFuncMod(autograd.Module):
def __init__(self, init):
super(QuadrFuncMod, self).__init__()
self.x = autograd.Variable(init)
def forward(self):
return f(self.x)
# Iteratively computing forward pass, backward pass and then doing a gradient step
def perform_gd(initializations, lrs, epochs=100):
n_runs = len(initializations)
print(f"Performing GD for {n_runs} runs with different initializations:")
func_value_history = []
x_value_history = []
for run in range(n_runs):
print(f"\nStarting run {run} with x_0={initializations[run]}")
func_value_history.append([])
x_value_history.append([])
module = QuadrFuncMod(initializations[run])
optim = GD(params=module.collect_parameters(), lr=lrs[run])
for epoch in range(epochs):
x_value_history[run].append(float(module.x.value.squeeze()))
# Set the gradient of all parameters to zero
optim.zero_grad()
# Forward pass constructs computational graph dynamically
func_value = module.forward()
# Like in pytorch: simply call backward pass on optimization criterion
# This performs backpropagation through the computational graph
func_value.backward()
# Optimizer reads out gradients of all parameters and performs on gradient step
optim.step()
func_value_history[run].append(func_value.value.squeeze())
if epoch % 25 == 0:
print(f"epoch: {epoch} | x: {module.x.value.squeeze():.3f} | f(x): {func_value.value.squeeze():.3f}")
return np.array(x_value_history), np.array(func_value_history)
# Perform optimization
initializations = [-3, 4]
learning_rates = [0.1, 0.8]
x_value_history, func_value_history = perform_gd(initializations, learning_rates)
Performing GD for 2 runs with different initializations:
Starting run 0 with x_0=-3
epoch: 0 | x: -2.400 | f(x): 11.000
epoch: 25 | x: -0.009 | f(x): 2.000
epoch: 50 | x: -0.000 | f(x): 2.000
epoch: 75 | x: -0.000 | f(x): 2.000
Starting run 1 with x_0=4
epoch: 0 | x: -2.400 | f(x): 18.000
epoch: 25 | x: 0.000 | f(x): 2.000
epoch: 50 | x: -0.000 | f(x): 2.000
epoch: 75 | x: -0.000 | f(x): 2.000
fig = plt.figure()
# plot GD trajectory
ax2 = fig.add_subplot(2, 2, 2)
x_range = np.arange(-4, 4, .1)
ax2.plot(x_range, f(x_range), label='f(x)', color='b')
ax2.plot(x_value_history[0], func_value_history[0], '-o', color='r', label='steps of GD 1')
ax2.plot(x_value_history[1], func_value_history[1], '-x', color='g', label='steps of GD 2')
plt.legend()
plt.title("GD trajectory")
plt.xlabel("x")
# plot error
x_star = 0 # analytical solution to minization problem
error = np.abs(x_value_history - x_star)
ax1 = fig.add_subplot(2, 2, 1)
line, = ax1.plot(error[0], color='r', lw=2, label='error of GD 1')
line, = ax1.plot(error[1], color='g', lw=2, label='error of GD 2')
ax1.set_yscale('log')
plt.title('Evolution of error')
plt.xlabel('Iteration $i$')
plt.ylabel('$|x_i-x^*|$')
plt.legend()
pylab.show()
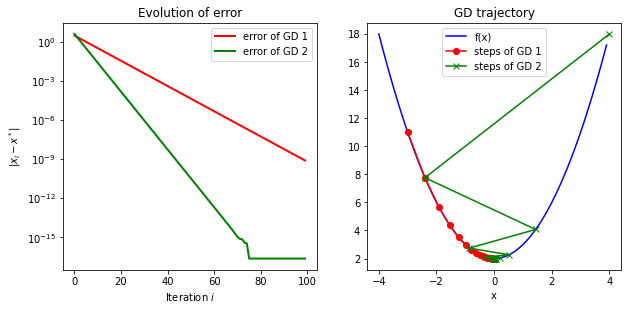
The visualization shows that the algorithm converged exponentially and converges to the global optimum, which was expected for a quadratic function.
Multivariate Minimization
In the follwing, the autograd engine is applied to a multivariate minimization problem. The basic principle is the same as in the previous example, however here the optimization regime is $\mathbb R^2$, as we optimize over $x$ and $y$. The minimization problem will be
\[x^*, y^* = \text{argmin}\left[{((x^2+y^3)-1) \cdot \exp{(-0.5{(x^2+y^2)})}}\right],\]
which is non-convex.
def z_func(x,y):
return -(1-(x**2+y**3))*np.exp(-(x**2+y**2)/2)
class MulVariableMod(autograd.Module):
def __init__(self, init_x, init_y):
super(MulVariableMod, self).__init__()
self.x = autograd.Variable(init_x)
self.y = autograd.Variable(init_y)
self.exp = autograd.Exp() # autograd supports a range of nonlinearities
print(f"\nStarting initialization: x={self.x.value.squeeze()}, y={self.y.value.squeeze()}")
self.params = self.collect_parameters()
def forward(self):
return -(1-(self.x**2+self.y**3))*self.exp(-(self.x**2+self.y**2)/2)
def perform_2d_gd(initializations, epochs=15):
n_runs = len(initializations)
print(f"Performing GD for {n_runs} runs with different initializations:")
# initializations have shape [runs, 2]
func_value_history = [] # collecting lists should have shape [runs, epochs] after loop
x_value_history = []
y_value_history = []
for run in range(n_runs):
module = MulVariableMod(init_x=initializations[run][0],
init_y=initializations[run][1])
optim = GD(params=module.collect_parameters(), lr=0.3)
func_value_history.append([])
x_value_history.append([])
y_value_history.append([])
for epoch in range(epochs):
x_value_history[run].append(float(module.x.value))
y_value_history[run].append(float(module.y.value))
optim.zero_grad()
func_value = module.forward()
func_value.backward()
optim.step()
func_value_history[run].append(func_value.value)
if epoch % 5 == 0:
print(f" epoch: {epoch} | x: {module.x.value.squeeze():.3f} | y: {module.y.value.squeeze():.3f} | f(x): {func_value.value.squeeze():.3f}")
return np.array(x_value_history), np.array(y_value_history), np.array(func_value_history)
# Perform optimization on multiple starting initializations
initializations = [[0.5, 1.8],
[-2, -2],
[-2, 2],
[1.6, -0.1]]
x_value_history, y_value_history, func_value_history = perform_2d_gd(initializations, epochs=15)
Performing GD for 4 runs with different initializations:
Starting initialization: x=0.5, y=1.8
epoch: 0 | x: 0.581 | y: 1.770 | f(x): 0.888
epoch: 5 | x: 1.037 | y: 1.426 | f(x): 0.686
epoch: 10 | x: 0.903 | y: 0.674 | f(x): 0.298
Starting initialization: x=-2.0, y=-2.0
epoch: 0 | x: -1.923 | y: -2.011 | f(x): -0.092
epoch: 5 | x: -1.272 | y: -1.979 | f(x): -0.323
epoch: 10 | x: -0.135 | y: -1.608 | f(x): -1.322
Starting initialization: x=-2.0, y=2.0
epoch: 0 | x: -2.099 | y: 2.055 | f(x): 0.201
epoch: 5 | x: -2.425 | y: 2.249 | f(x): 0.079
epoch: 10 | x: -2.606 | y: 2.362 | f(x): 0.043
Starting initialization: x=1.6, y=-0.1
epoch: 0 | x: 1.541 | y: -0.115 | f(x): 0.431
epoch: 5 | x: 0.397 | y: -0.209 | f(x): -0.259
epoch: 10 | x: 0.000 | y: -0.100 | f(x): -0.994
Function and plot taking from here: Link
Visualize GD Trajectories
# Plot the GD trajectories
x = np.arange(-3.0,3.0,0.1)
y = np.arange(-3.0,3.0,0.1)
[X, Y] = np.meshgrid(x, y)
fig, ax = plt.subplots(1, 1)
Z = z_func(X,Y)
ax.contourf(X, Y, Z)
ax.set_xlabel('x')
ax.set_ylabel('y')
for run in range(x_value_history.shape[0]):
plt.plot(x_value_history[run], y_value_history[run], '->', color='r', label=f'GD run: {run}')
plt.title("GD trajectories for different initializations")
plt.legend()
plt.show()
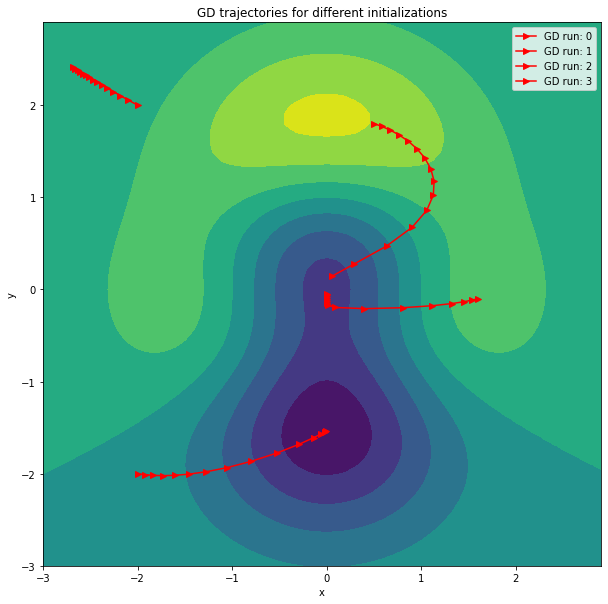
We can nicely see that the GD trajectories are orthogonal to the contour lines. Furthermore, not all runs converge to the global minimum, which is due to the the loss function not being convex.
Perceptron
Let us move into the direction of neural networks and train an adaption of the Perceptron. The goal is to perform a simple two class classification problem on the dataset of inputs $X = {x_i}$ and labels $Y = {y_i}$. Our Perceptron model has the form
\[f_{w,b}(x) = \tanh(w^Tx+b)\]
We train it to minimize the MSE loss between its prediction $\hat y = f_{w,b}(x)$ and the given label $y$,
\[l(\hat y, y) = (\hat y - y)^2 = \left(\tanh(w^Tx+b) - y\right)^2.\]
So we finally have the optimization problem
\(w^*, b^* = \text{argmin}_{w, b} \left[ \sum_{x \in X, y \in Y}\left(\tanh(w^Tx+b) - y\right)^2\right]\).
The gradients of the objective will be computed with autograd and the model then trained with backpropagation.
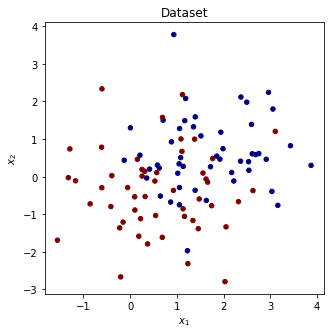
Dataset
# load simple two class dataset
from sklearn.datasets import make_blobs
x_data, y_data = make_blobs(n_samples=100, centers=2, n_features=2, center_box=(-4, 4))
y_data = 2*y_data - 1
plt.figure(figsize=(5,5))
plt.scatter(x_data[:,0], x_data[:,1], c=y_data, s=20, cmap='jet')
plt.title('Dataset')
plt.xlabel('$x_1$'), plt.ylabel('$x_2$')
plt.show()
# function to train multiple perceptrons with different starting initializations
from autograd.nn import Dataset, Linear
class Perceptron(autograd.Module):
def __init__(self, output_size, input_size):
"""
Autograd Module to create a perceptron
"""
super(Perceptron, self).__init__()
self.linear = Linear((output_size, input_size))
self.acti = autograd.Tanh()
def forward(self, _x):
return self.acti(self.linear(_x))
def perform_gd_perceptron(dataset, weight_initializations):
loss_hist = []
weight_hist = []
bias_hist = []
n_runs = weight_initializations.shape[0]
for run in range(n_runs):
# Train the Perceptron
print(f"\nTraining perceptron {run} with initialization w={weight_initializations[run]}")
epochs = 400
loss_hist.append([])
weight_hist.append([])
bias_hist.append([])
perceptron = Perceptron(output_size=1, input_size=2)
perceptron.linear.weight.value = weight_initializations[run].reshape(1, 2).copy()
optimizer = GD(params=perceptron.collect_parameters(), lr=0.1)
for epoch in range(epochs):
weight_hist[run].append(perceptron.linear.weight.value.squeeze().copy().tolist())
bias_hist[run].append(perceptron.linear.bias.value.squeeze().copy().tolist())
optimizer.zero_grad()
loss = perceptron.forward_dataset(dataset, mseloss)
loss.backward()
optimizer.step()
loss_hist[run].append(float(loss.value.item()))
if epoch % 100 == 0:
print(f"epoch: {epoch} | loss:{loss.value.squeeze():.4f}")
return np.array(weight_hist, dtype=object), np.array(bias_hist, dtype=object), np.array(loss_hist)
Train Perceptrons
# Define dataset, loss and different starting initializations
dataset = Dataset(x_data.reshape(-1 , 2, 1), y_data.reshape(-1, 1, 1))
mseloss = autograd.MSELoss()
weight_initializations = np.array([[2., 2.], [2., 0.], [-2., 2.], [-2., -2.]], dtype=float)
weight_hist, bias_hist, loss_hist = perform_gd_perceptron(dataset, weight_initializations)
final_weights = weight_hist[:, -1, :]
Training perceptron 0 with initialization w=[2. 2.]
epoch: 0 | loss:2.6509
epoch: 100 | loss:2.0548
epoch: 200 | loss:1.9840
epoch: 300 | loss:0.6652
Training perceptron 1 with initialization w=[2. 0.]
epoch: 0 | loss:2.2379
epoch: 100 | loss:0.6743
epoch: 200 | loss:0.6574
epoch: 300 | loss:0.6574
Training perceptron 2 with initialization w=[-2. 2.]
epoch: 0 | loss:1.6412
epoch: 100 | loss:0.9155
epoch: 200 | loss:0.6885
epoch: 300 | loss:0.6575
Training perceptron 3 with initialization w=[-2. -2.]
epoch: 0 | loss:0.8706
epoch: 100 | loss:0.7724
epoch: 200 | loss:0.7447
epoch: 300 | loss:0.7140
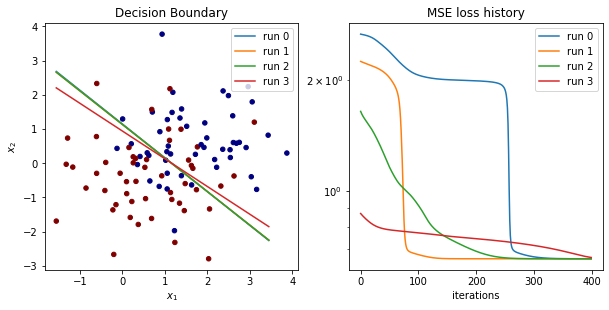
Let’s Visualize Results
fig = plt.figure()
ax1 = fig.add_subplot(2, 2, 1)
# plot learnt decision boundaries
x_range = np.arange(min(x_data[:,0]), max(x_data[:,0]))
ax1.scatter(x_data[:,0], x_data[:,1], c=y_data, s=20, cmap='jet')
for i, w in enumerate(final_weights):
decision_boundary = -(w[0]/w[1])*x_range - bias_hist[i, -1]/w[1]
ax1.plot(x_range, decision_boundary, label=f'run {i}')
plt.title('Decision Boundary')
plt.xlabel('$x_1$')
plt.ylabel('$x_2$')
plt.legend()
# plot loss
ax2 = fig.add_subplot(2, 2, 2)
for i, loss in enumerate(loss_hist):
ax2.plot(loss, label=f'run {i}')
plt.title('MSE loss history')
plt.legend()
plt.xlabel('iterations')
plt.yscale('log')
plt.show()
GD Trajectory in the Weight Space of the Percpetrons
# loss as function of perceptron weight parameters
def weight_to_loss(w0s, w1s):
perceptron = Perceptron(output_size=1, input_size=2)
i_max, j_max = w0s.shape
Z = np.zeros(w0s.shape)
for i in range(i_max):
for j in range(j_max):
perceptron.linear.weight.value[0, 0] = w0s[i, j]
perceptron.linear.weight.value[0, 1] = w1s[i, j]
Z[i, j] = perceptron.forward_dataset(dataset, mseloss).value.squeeze()
return Z
# Compute loss for a mesh of weight values
x = np.arange(-4.0,4.0,0.4)
y = np.arange(-4.0,4.0,0.4)
[X, Y] = np.meshgrid(x, y)
Z = weight_to_loss(X,Y)
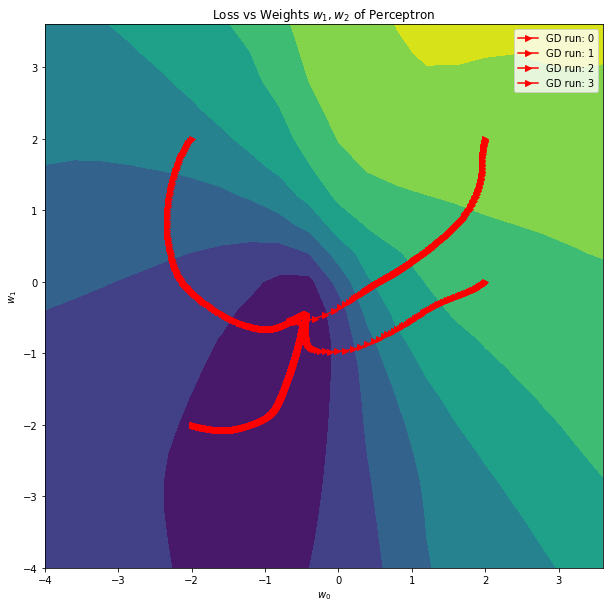
# Plot the GD trajectories in weight space
fig, ax = plt.subplots(1, 1)
ax.contourf(X, Y, Z)
for i, w in enumerate(weight_hist):
ax.plot(w[:, 0], w[:, 1], '->', color='r', label=f'GD run: {i}')
ax.set_xlabel('$w_0$')
ax.set_ylabel('$w_1$')
plt.title("Loss vs Weights $w_1, w_2$ of Perceptron")
plt.legend()
plt.show()